自组5寸调参(PID)过程
661 2024-04-25 10:24
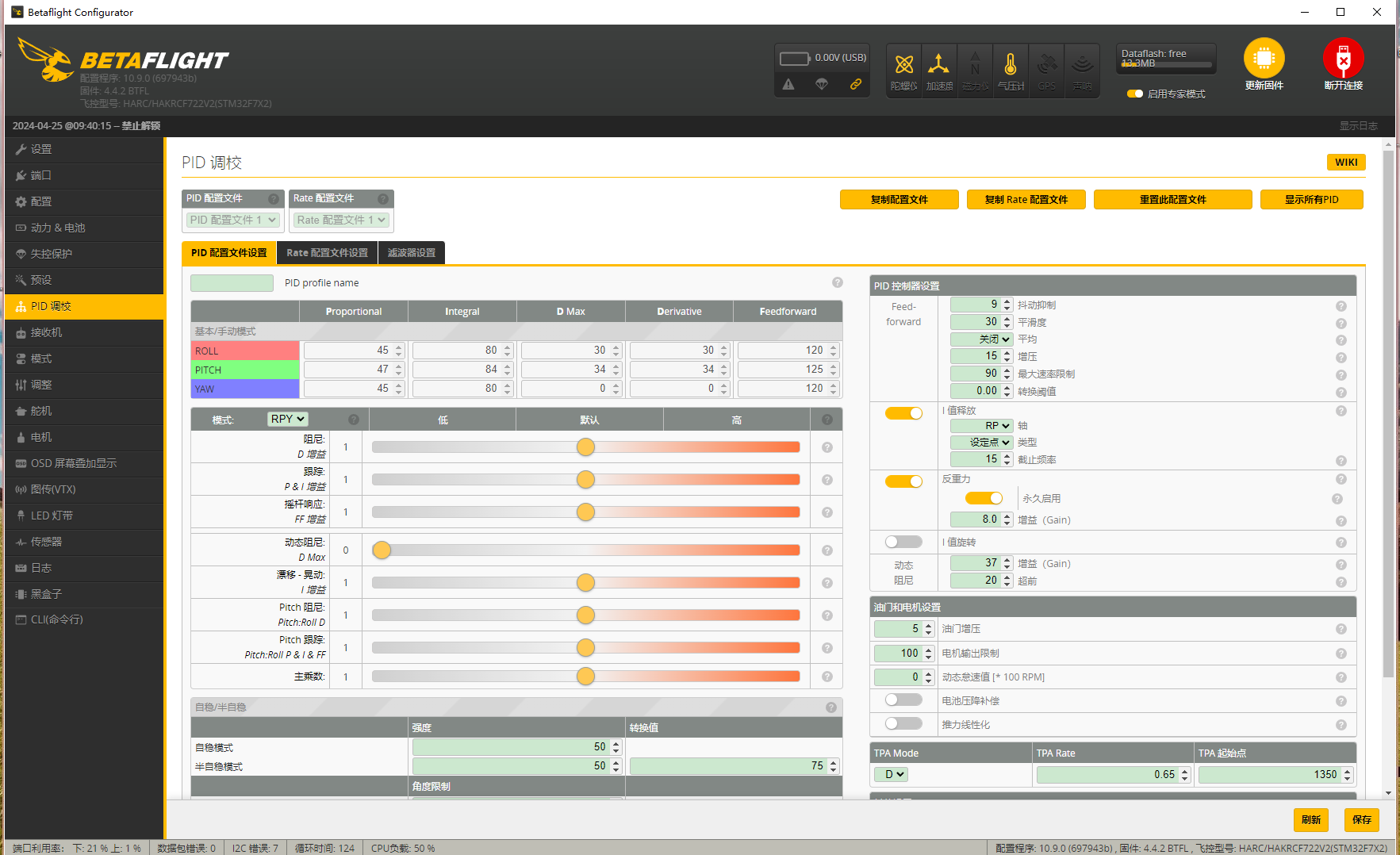
首先确定宽叉机架,所以默认给P:R比例增加为1.1,然后从所有默认值看主乘数1.0过高。所以降低为0.9
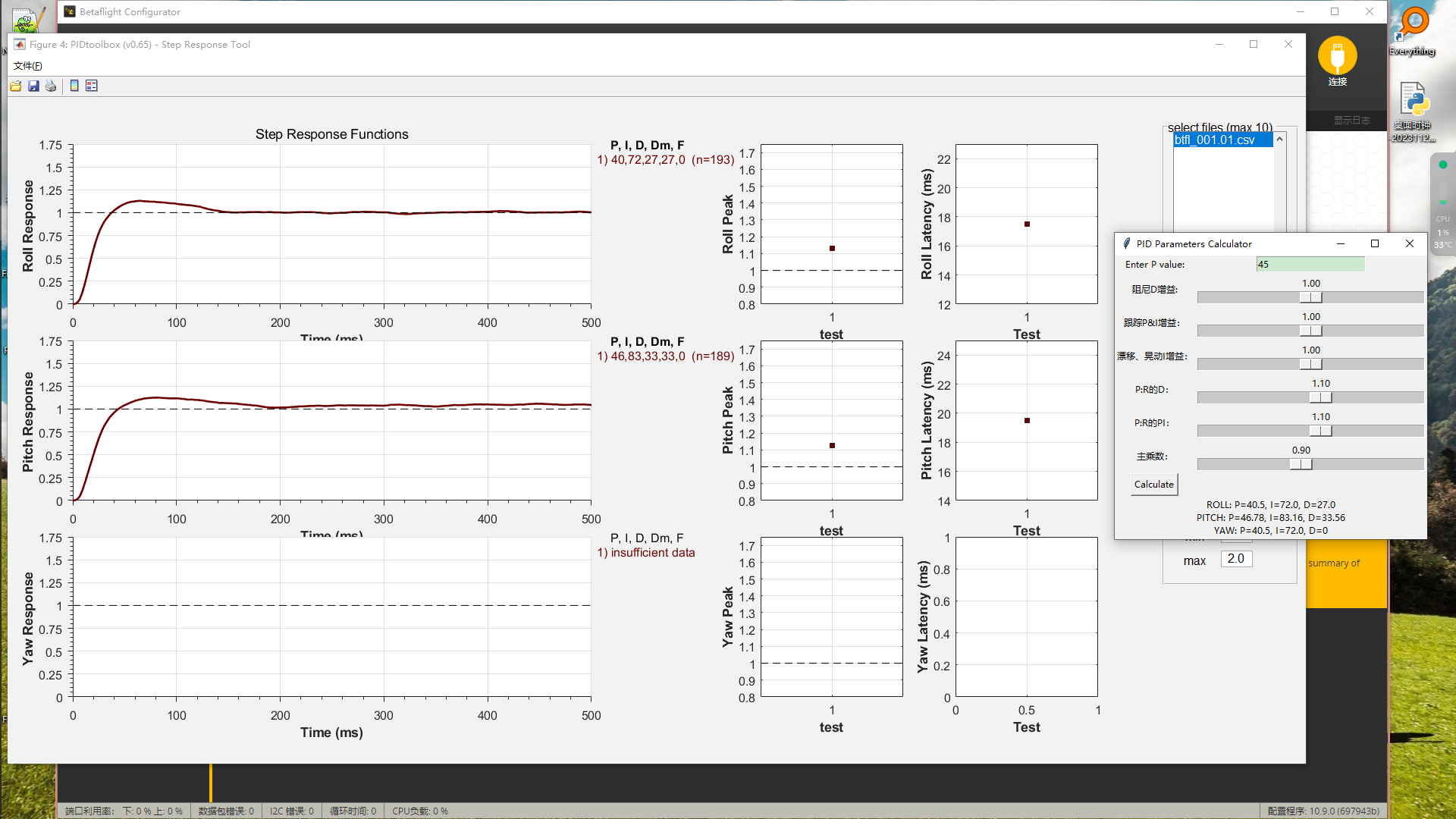
感觉依然过高,所以增加D值看能不能压得住
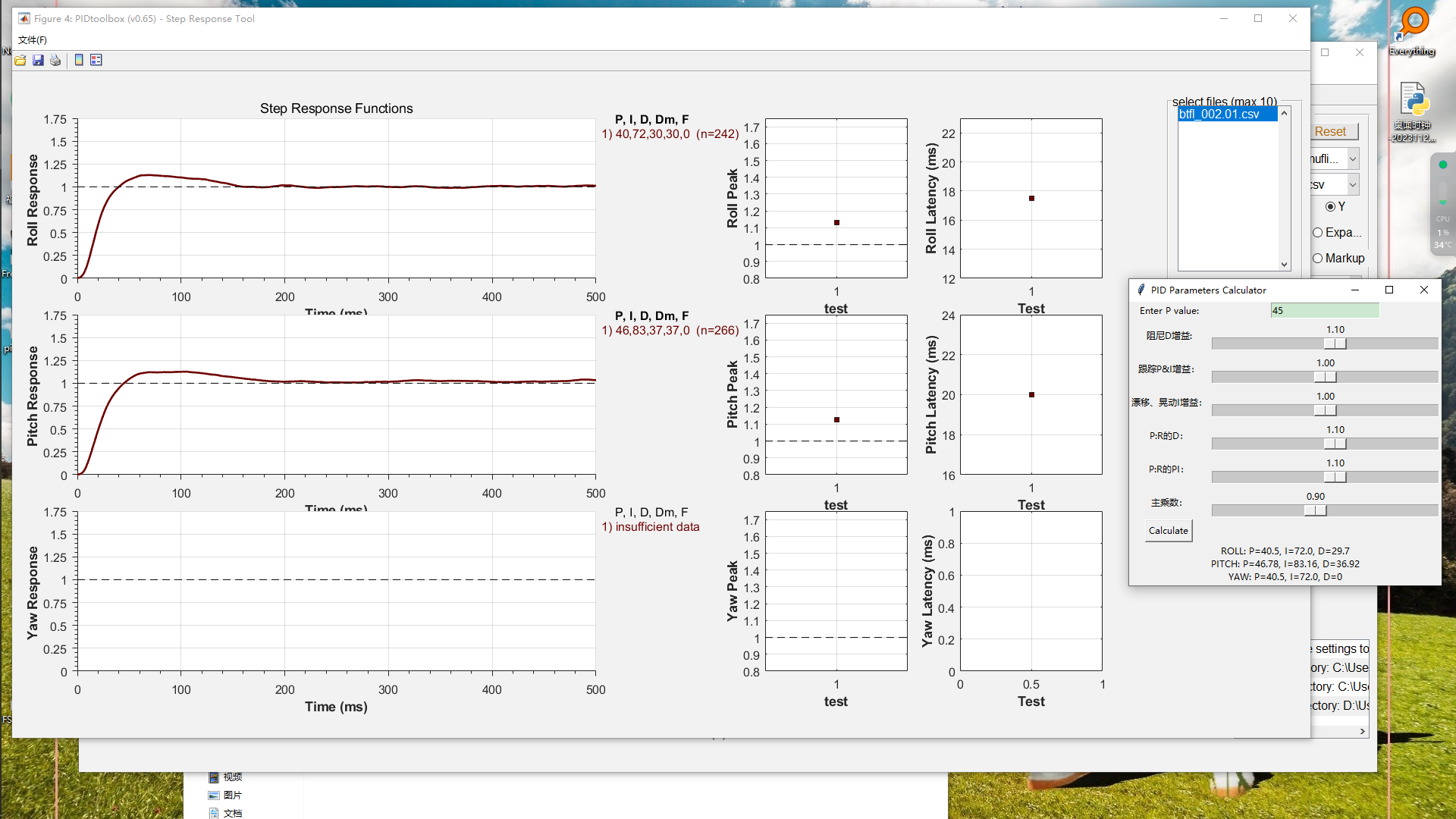
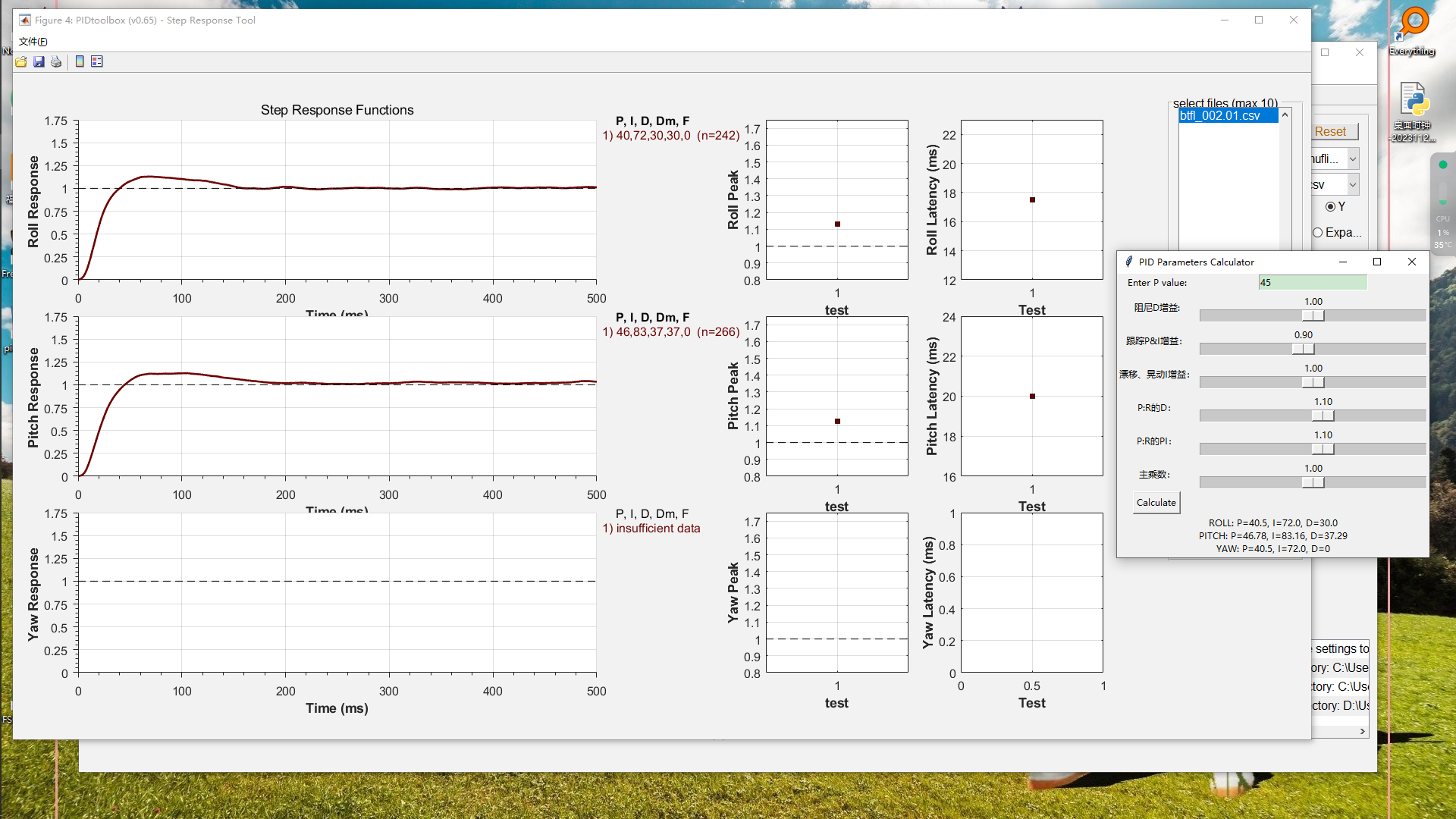
下面这种办法恢复了主乘数,而改用降低整体PI(包括横滚轴和俯仰轴两者),PID理论值和上面降低主乘数的值差别不大。
第一条曲线,所有值为1
第二条曲线,在第一条曲线的基础上,增加P:R的比例为1.1
第三条曲线,在第二条曲线的基础上,增加主乘数为1.1
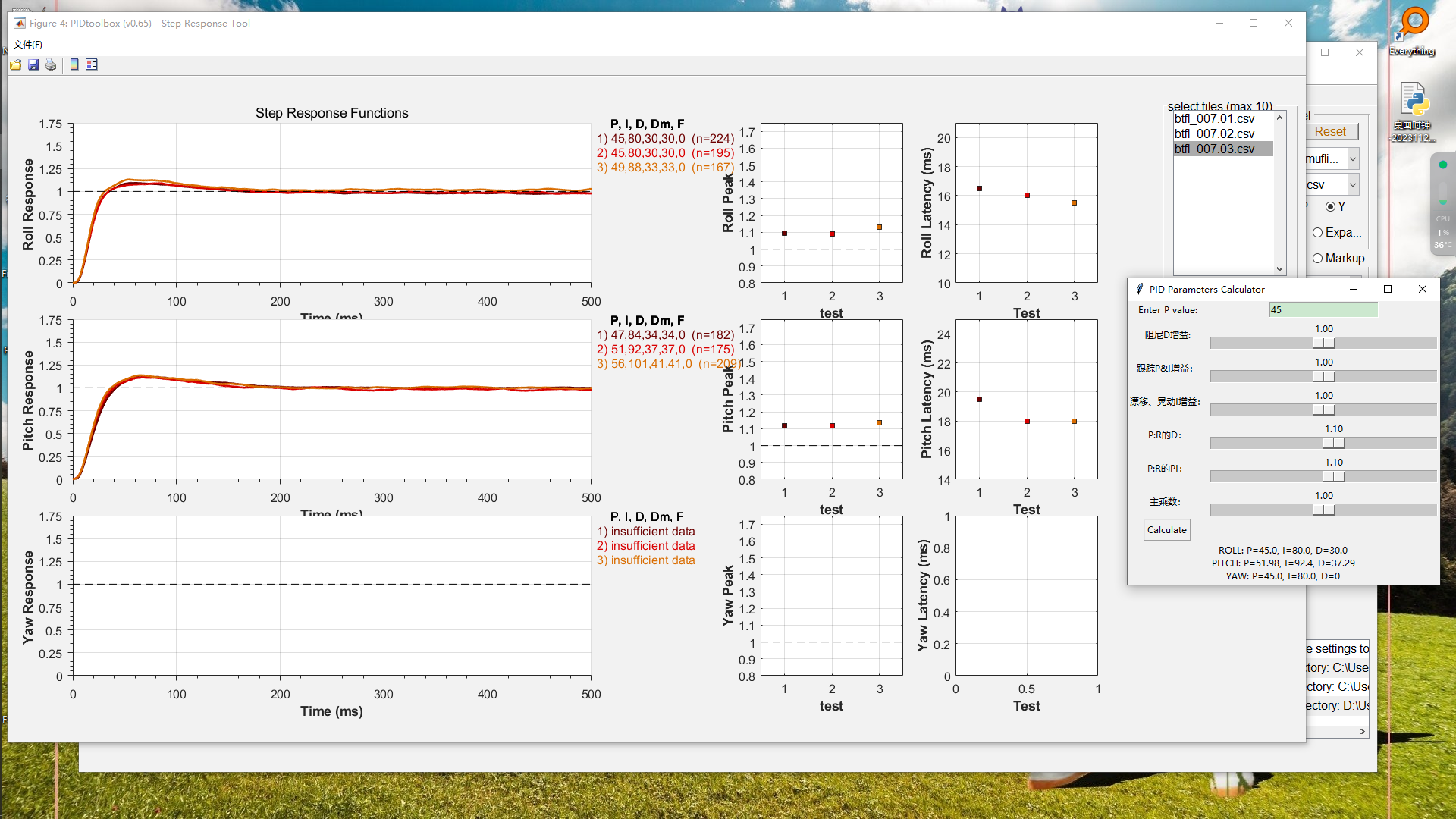
观察得出,第三条曲线除了在roll轴上降低了响应时间之外,roll峰值反而更高了,说明PI比例超调,所以最终选择了第二条曲线的方案。
最后使用上动态阻尼:)
分类
热门文章

Tags
关于
提供Arduino芯片编程、Java网站设计、抢票系统、秒杀系统的支持以及创客服务
全部评论