自组5寸高手阶段调参(PID)过程
2151 2024-04-25 10:24 2025-08-06 11:44
由于熟练掌握了精准打杆儿,进入了高手行列,所以需要对pid进行高阶的调整。降低前馈,避免手感差异。新手期前馈可以帮我们觉得摇杆儿很灵敏,高手期需要前馈尽可能少的影响杆儿量微调的手感,所以如果不是因为动态阻尼可以为电机降温,并且动态阻尼是前馈一条龙服务的赠品,否则前馈完全可以关掉。前馈预知帮助你提前增大的那部分P值,还不如你自己脑子里线性增加的那一小段时间。
5寸宽X机架粗暴调节:
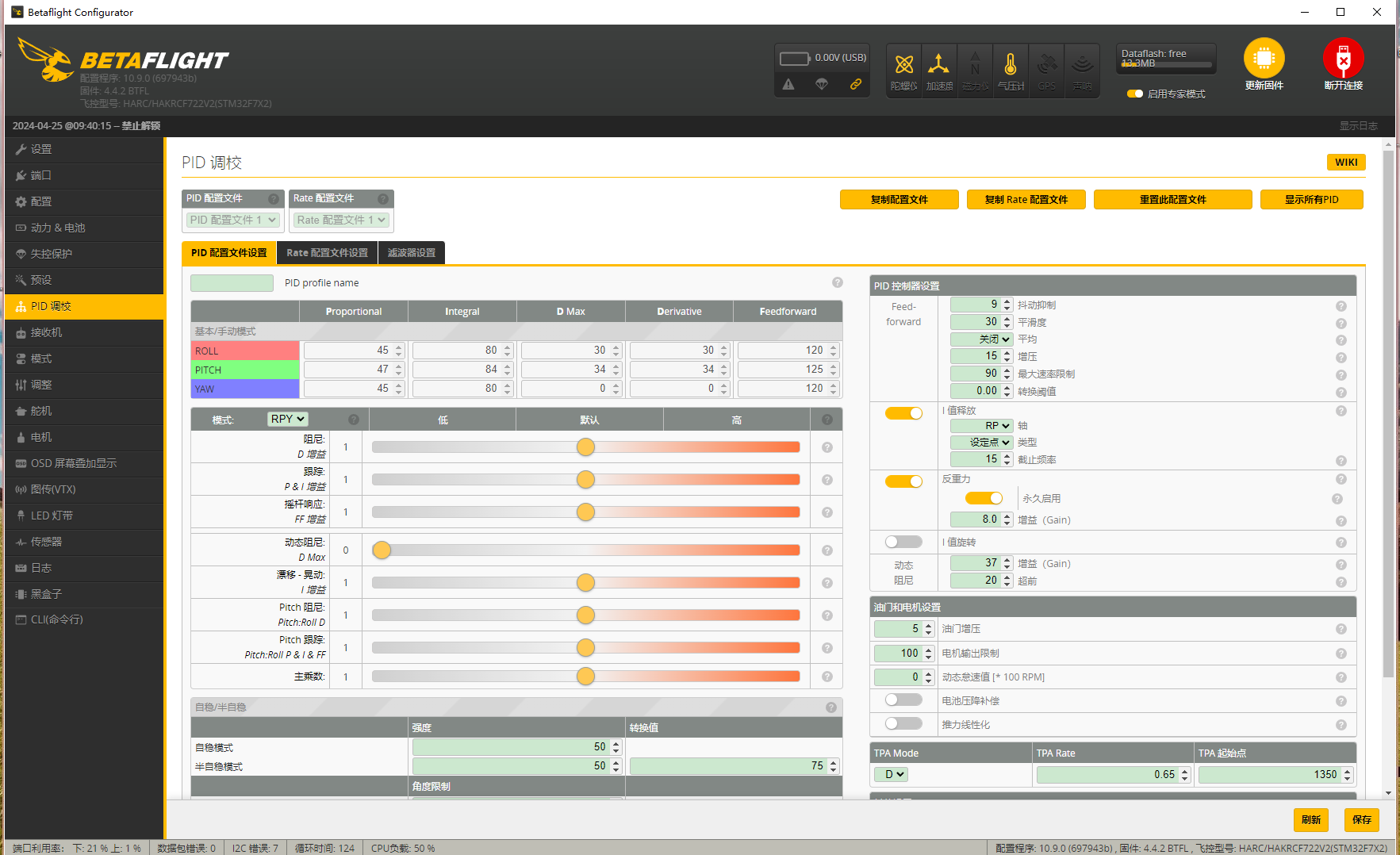
原则1:首先确定宽叉机架,所以默认给P:R比例增加为1.1
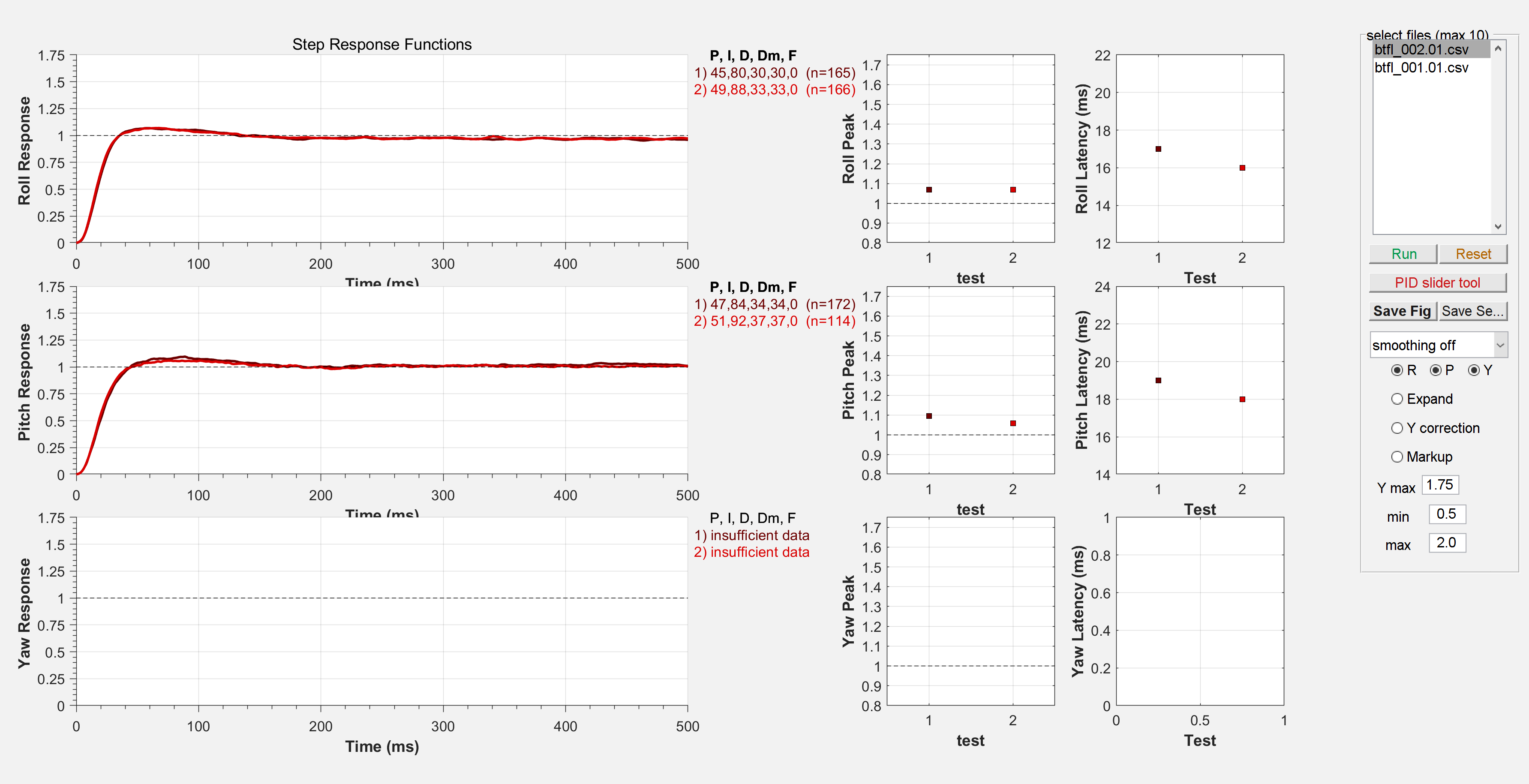
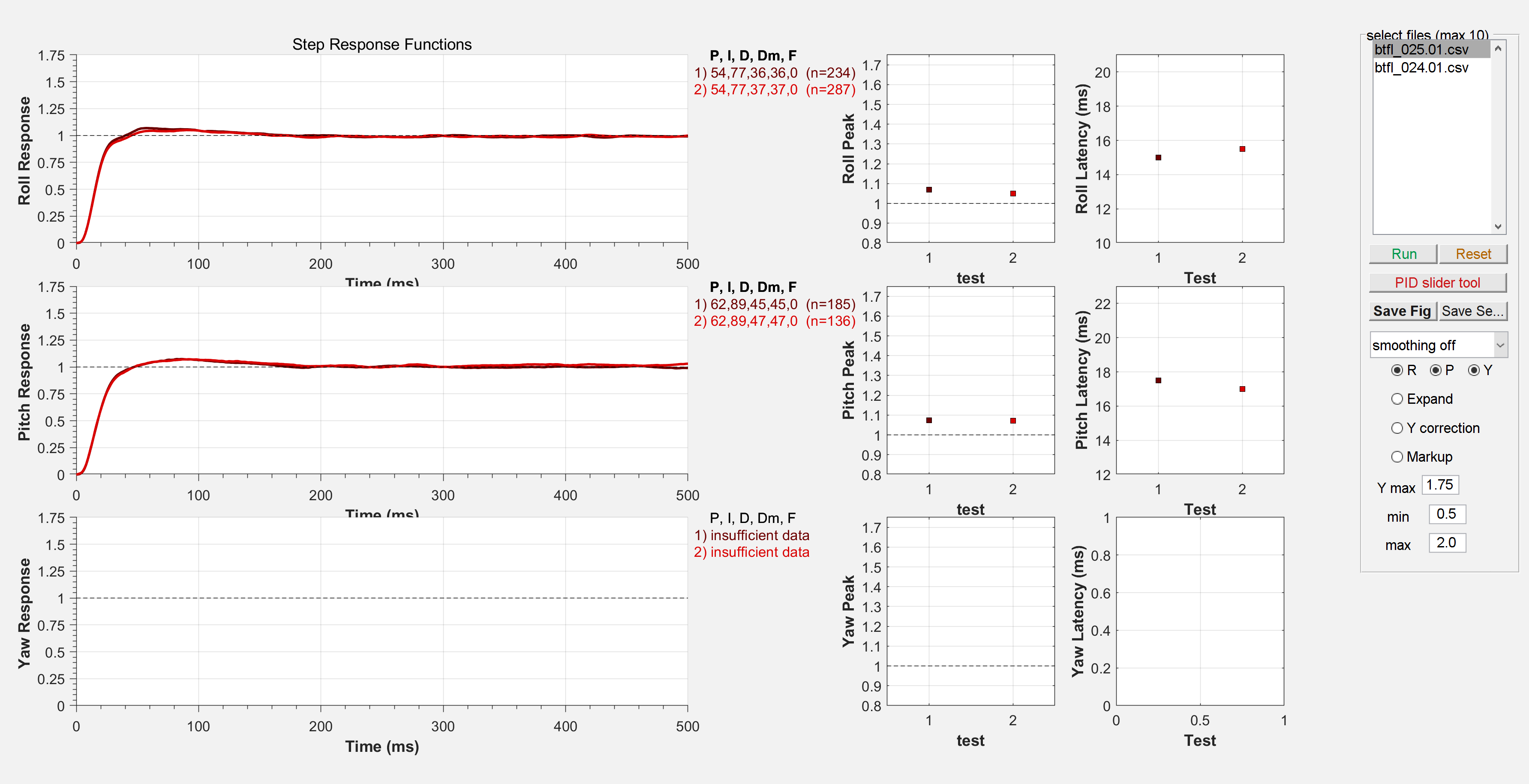
由上图可知简单调整曲线1为默认参数,曲线2为主乘数1.1的pid调校参数,产生的效果仅仅是让pitch轴相应变快,可知pitch比roll比例可调。于是将p与r比例调成1.1。
原则2:
主乘数的意义就是避免单独调整pi和d达不到中间漏掉的0.5步阶而微调用的。主乘数与PI+D的乘法,可以让滑块更加均衡。
原则是为了更大的D,需要更大的P,而滑块会带动I增加,所以要单独降低I。都调整好了之后,因为动态阻尼,可以降低平时的D,所以给到对应的FF。为了避免FF影响高手的手感,所以当主乘数乘以PI+D找到合适的PIDs之后,可以将主乘数调回到0,看看PI+D的滑块是否过于突兀(超过1.3之类)。然后进行配合调整。
为什么要设计成宽x,因为要用电机的转动惯量,去平衡纵向放置的电池;摄像头、飞塔(飞控、电调)、接收机、图传、图传天线(以及接收机天线)、BB响、GPS。
说人话就是,同样的力道,转个金箍棒,谁都知道旋钮(转竹蜻蜓)要比抡起来要省力。
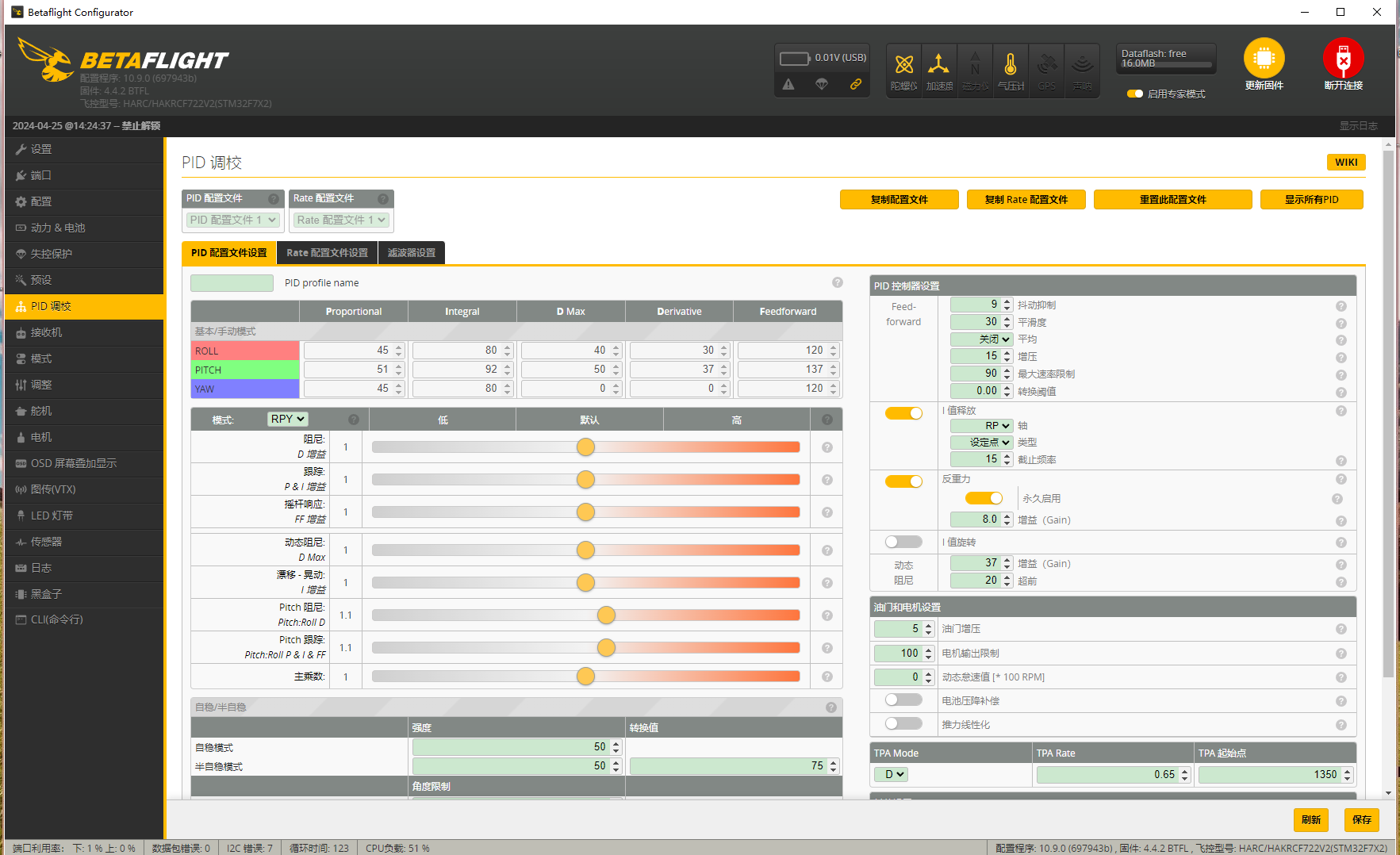
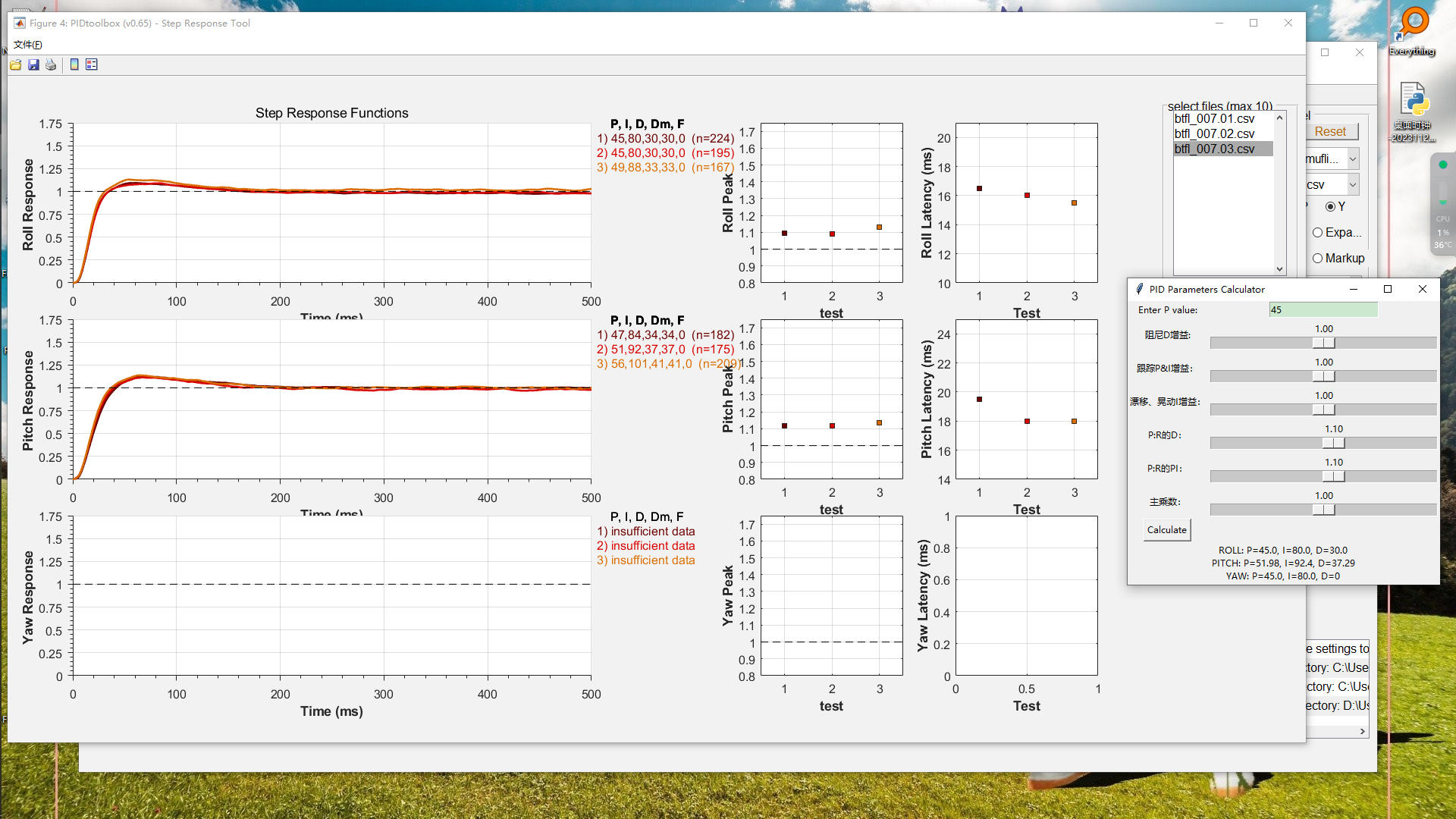
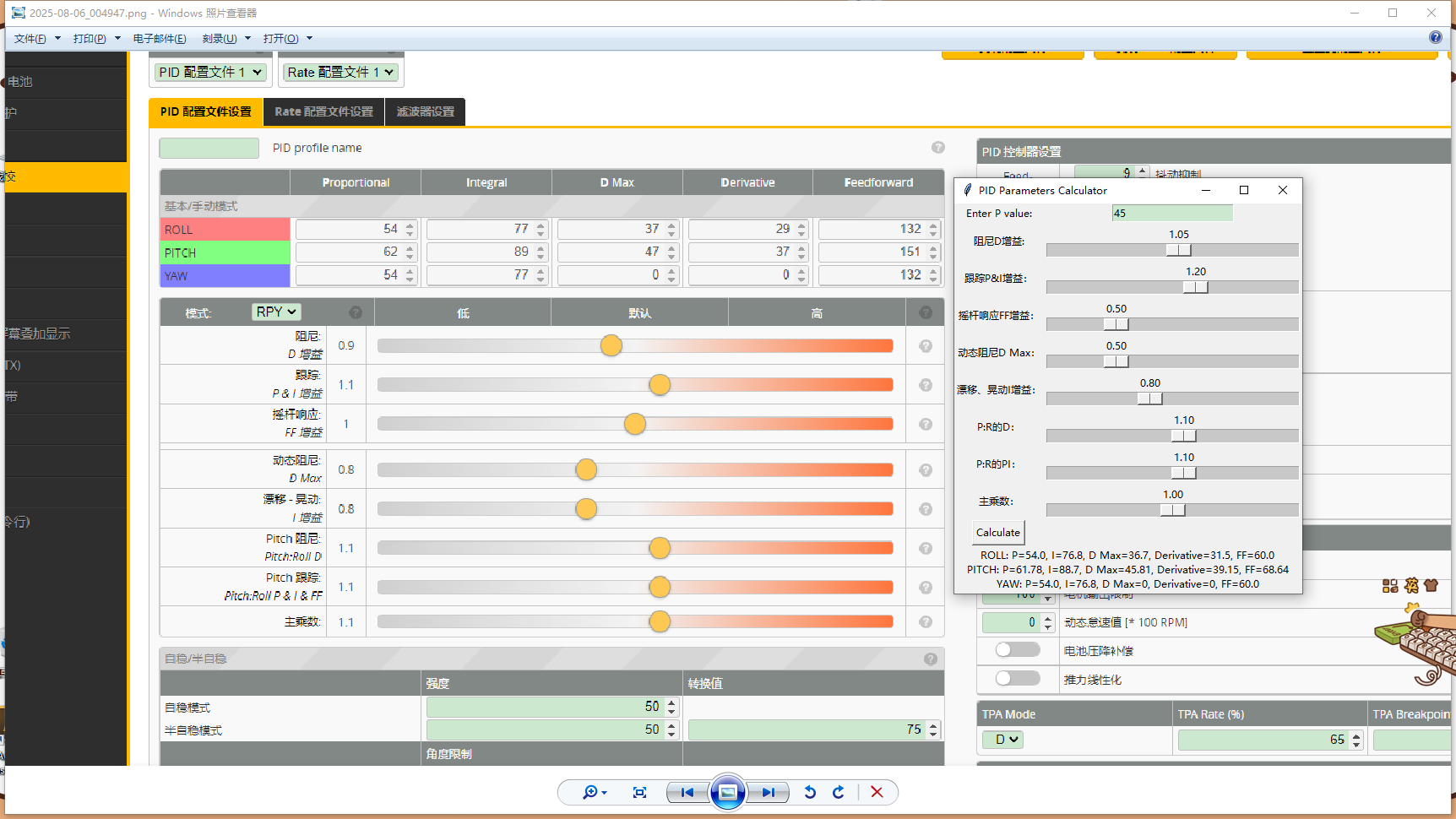
上面调参过程的说明,首先我要调整的是中①P:R的比例,所以D和PI是等比增加到1.1,然后因为测试显示默认的②PD比例很OK,所以要增加D那么就用主乘数和PI的加成来达到最终的PI:1.05*1.15=1.2075,让D比P大一些,让I回归到默认PID的状态,所以缩减为0.8.最后试飞发现小山丘比较好的保存了第一个,所以调参结束。


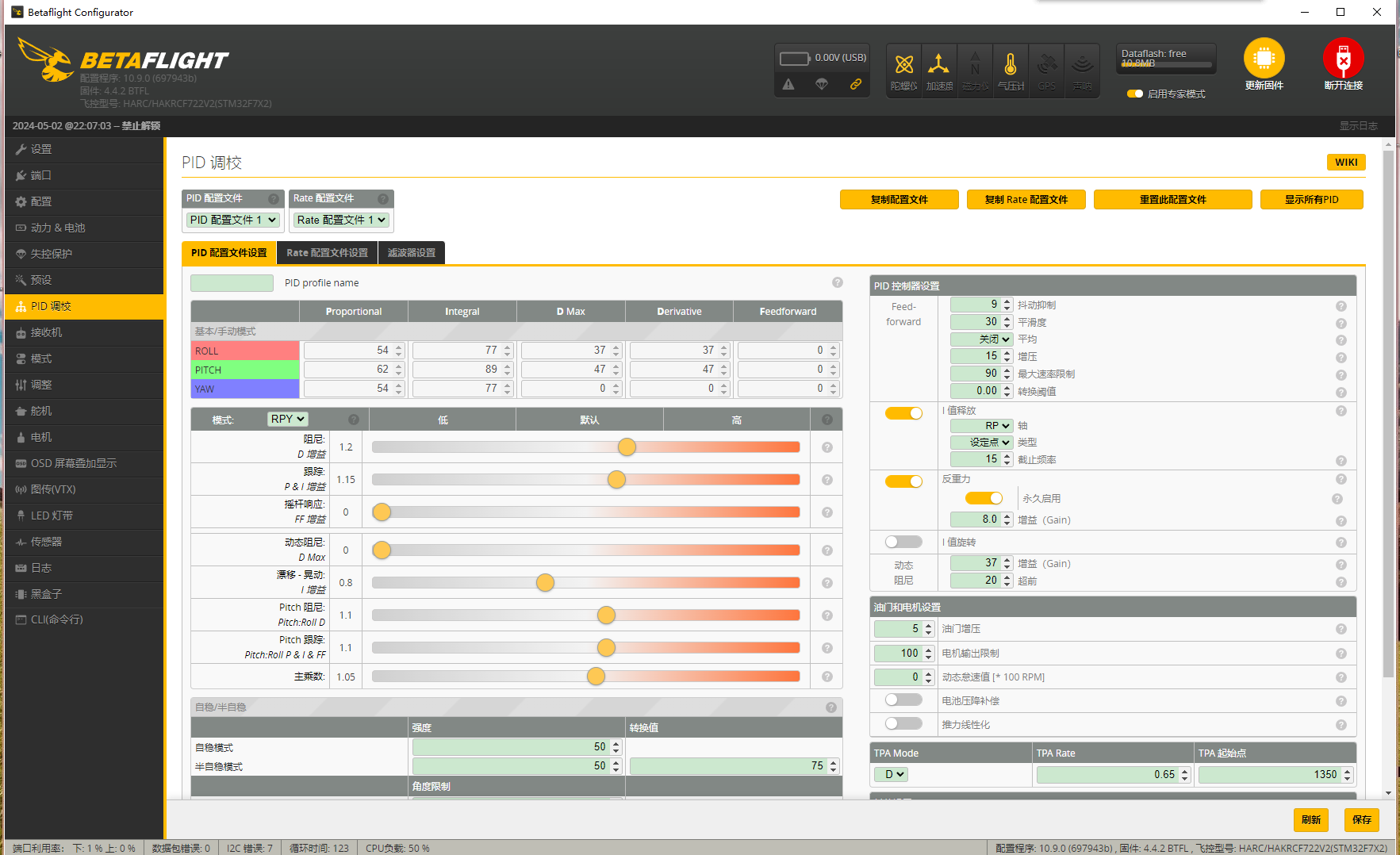
高手阶段更改如下:


分类
热门文章

Tags
关于
提供Arduino芯片编程、Java网站设计、抢票系统、秒杀系统的支持以及创客服务
全部评论