穿越机练习原则与进阶——1——新手选择摄像头角度
9580 2023-04-26 11:38 2025-03-18 11:14
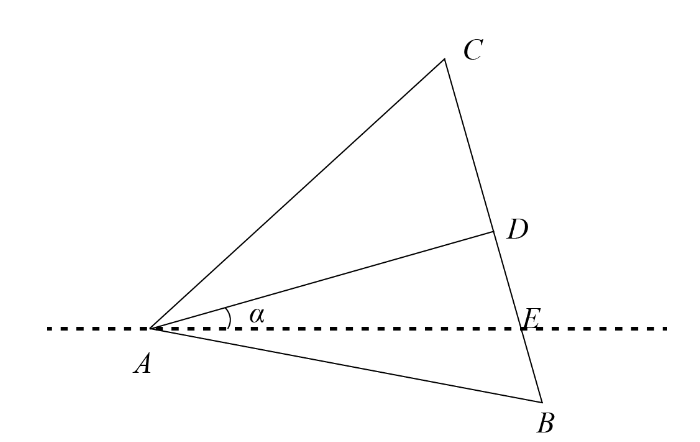
受力分析图:N是桨叶平面提供的支持力,G是整个穿越机受到的垂直向下的重力,F是带动穿越机平飞向前的动力。F与飞行时产生的风阻平衡。由图可知,风阻越大,需要F越大,代表速度越快。
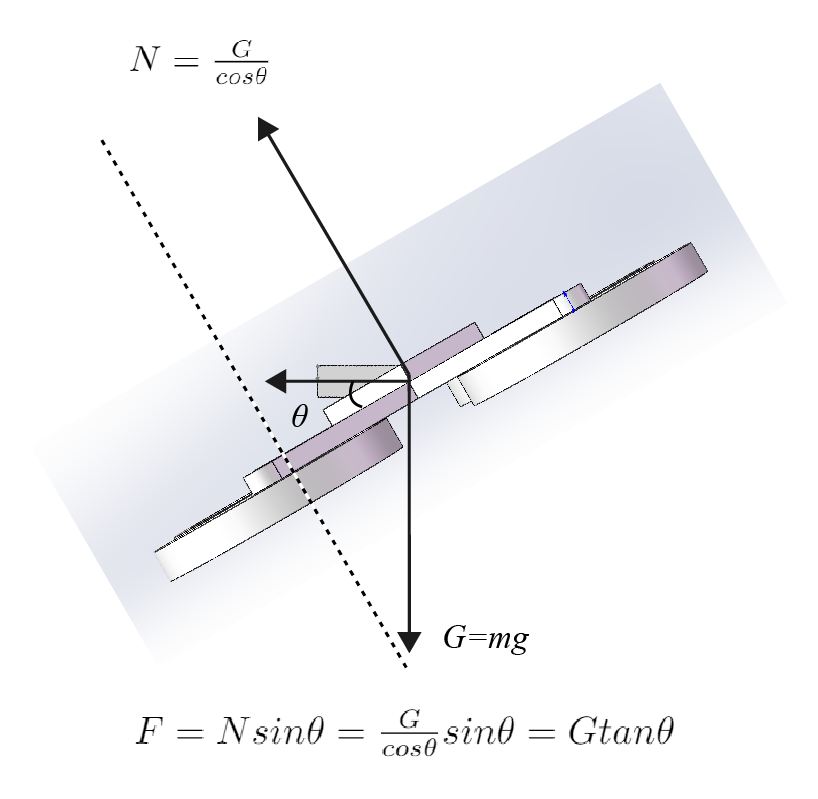
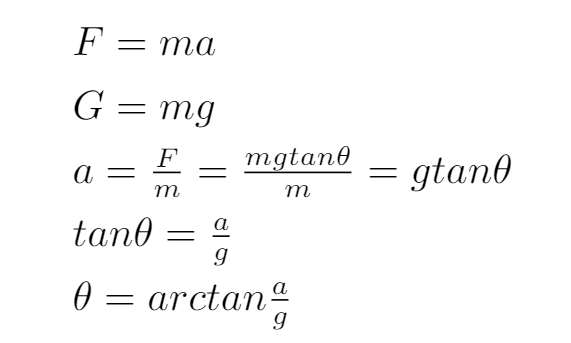
公式推导:a为向前加速度,摄像头角度越高,向前加速度越大。前提是不掉高。而维持高度,也就意味着电机提供的升力在垂直方向上的分量要足够维持整机重量。
重力常数g=9.83N/kg。N是力的单位,字母表示为N,1N大约是拿起两个鸡蛋的力。
原则:不反人类原则。无论是新手还是老手,正常人类会把摄影和观察视角放在屏幕正中心。所以除了起飞和刹车需要根据自己飞机的个例情况进行操控。其他时候,所谓的平飞,都是天空与地面比例五五开。以此为基础进行下述讨论。
看飞机:角度决定的是最常使用的平飞速度。
- 性能好(推重比高的电机、放电系数大的电池)的穿越机,角度可以设置20~35度;
- 小飞机2s以下的花飞,室内飞行不追求速度而追求平稳的,角度可以设置在13~23度。
看花飞目的:
- 喜欢横棍旋转的,使用低角度;
- 喜欢绕头顶大回环、绕侧面刷锅,使用高角度。
看操控:
- 喜欢靠偏航调整转向的用低角度
- 喜欢靠横滚配合偏航转向的用高角度
受力过程,首先推力(油门),需要满足飞机自身的重力。在此基础上,平飞就是海平面在屏幕正中央五五开。平飞状态下10度是四六开。首先有了推力的大小,然后确定前进加速度的大小。比如预期是3秒加速到3米/秒(10.8 千米/时)。
v=at,3=a*3.
可以计算出想要的角度。
也就是说,平飞加速时,油门的大小N取决于摄像头角度1/cosθ和质量m,当你利用惯性停止时(非静态平衡下的悬停),你要考虑自己飞机的克数和摄像头的角度。θ越大,同等升力维持重力的情况下,升力的分量占比越小,油门只有越大。很快达到油门的上线,导致油门跟不上θ角度的增加而掉落。
通过上述推理,得出一个有意思的结论,就是不管大飞机、小飞机,只要动力足够,那么不管他们的质量相差多少。都可以完成同样时间下的同样轨迹的动作。经典的理论就是单摆做简谐运动的周期与摆球的质量 无关。
单摆周期:
当摄像头角度越高,向心力越大,向心加速度越大,周期越小,角速度就会越大。但是有趣的是,在同等角速度的情况下,摄像头如果越朝向地面,眩晕感会越严重。所以,抬高后,反而会觉得稳重好打理。对于越小的半径转弯,抬高摄像头反而越容易控制飞机姿态,这也造就了,越快的速度冲向弯道,反而越稳的漂移过小弯。所以对于大半径漂移过弯,用小角度,对于小半径漂移过弯,用大角度。
总结:简单说,
1. 摄像头角度越大,转弯时油门对转弯减速(水平加速度)的影响将越大,所以对转弯越好控制(转弯半径小)。
2. 摄像头角度越小,对平飞时的速度越好控制(人类正常五五开的天地画面就是悬停。越接近0度,越容易悬停。)

保证右手对操纵杆的优先控制,然后才是左手,毕竟左手油门可以靠阻尼稳定不变。
保证的方法:
右手小指抠住凹槽,无名指拦住右前下的砖楞,中值大概在播轮,大拇指左前按在摇杆右下,食指可离开,也可贴合摇杆形成勾环状。
原理:
今天做了飞行实验,可能和模型有关。我原以为固定的油门对应固定的高度。因为升力和气压相抵消。但是在freerider软件中。在悬停稳定后,推动方向键。由于升力方向由垂直被受力分解为垂直于机面的力和重力方向的分力。所以重力方向上的分力不足以消掉自身的重量。因此机面会降低,同时水平方向的分力会导致机身前进。总体运动是向前向下的。当自稳模式回中的时候。奇怪的事发生了。油门自始至终没有变化。但是无人机高度降低后不会回升。这告诉我们一个道理。前进的时候需要给油。平衡的时候需要补油拉高。同理。当水平方向的摇杆回中之后,其实油门是大于悬停时的油门的。因此如果前进变为急停的时候,要适当降油门。否则在视角回归高处的时候并不单单是视角高了,其实机身也已经高了。
为什么油门不变的情况下,水平面的改变(这里指推俯仰和左右横滚,不包括拉俯仰)会导致掉高。因为油门在竖直方向上的分量被水平面的倾斜削弱了。
练习转弯:先歪头(横滚),再右转/左转(偏航)
练习刹车:俯仰回正,稍微收油
练习前进加速:俯仰前倾,稍微收油
以上均是先右手后左手。
进阶:
练习爬坡:俯仰后拉,加油上升。原理:俯仰决定方向,既然是上坡,那么方向调正,然后给油。
练习滑翔(降低):俯仰前推、收油下降
进阶2:
练习急转弯的减速稳定:先横滚(减少俯仰,甚至可以利用俯仰刹车),再偏航并且收油。原理:如果加油会螺旋升天。急转弯卸力后给油防止落地。
练习直角转弯的左右摆动不影响前进速度。
明确一点说,就是收油到0和俯仰横滚归零就是能量输出最小,虽然不等于刹车(惯性越大越不等于)。但是却是首先降低自己的复杂输出的最好方式。
然后就是急刹需要考虑的向心力。一方面转弯急刹需要更大的横滚,同时需要减少俯仰的输出(这是最快的减少向心力的方法),甚至可以让俯仰的前倾改为后仰,但随之而来的必然是收油后的给油,虽然已经不能完成漂亮的向心力圆弧,但是至少不会造成坠机。
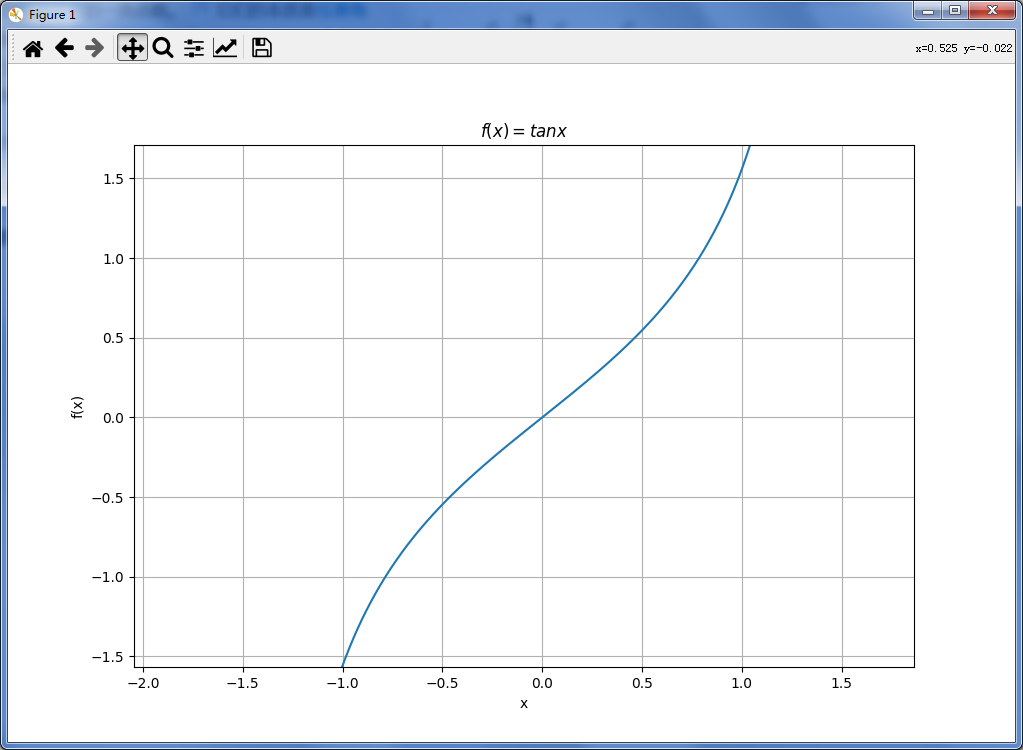
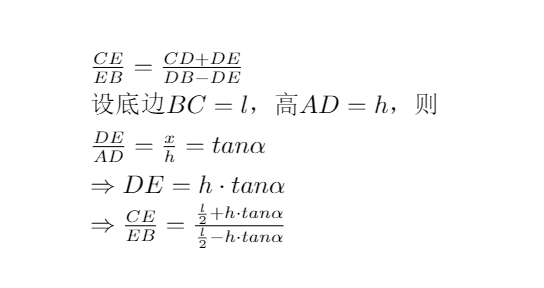
穿越机摄像头角度和画面地平线比例公式的推导
import math
math.tan(math.pi/180 * 23)
0.42447481620960476
所以建议新手在这三个角度中选一个练习。室内我就13、由于我要飞地库,所以稳定在18度、户外我就23.
摄像头的角度,初级阶段,应该去找平飞(平稳慢速飞行)时五五开的角度。晋升阶段,应该去找绕树拐弯时常用速度以及弯度下,摄像头能够观察的最佳角度,将来会涉及到横滚后倒车。而不要考虑如何观察停机坪(降落)、不要考虑垂直减速(坠落)。
五五开,实际上是我们对升力留有余量,当给大油门的时候我们的飞机是可以加速提升高度的,如果试试26度,不管怎么给油门,在五五开的情况下,飞机都只能加速不能提高。
目前进阶原因:升空后静止,斜向前下45度,推油门走直线就是23度
往期内容:
穿越机练习原则与进阶——2——左半心/右半心-左小旗帜/右小旗帜
穿越机练习原则与进阶——6——不同角度下的转弯,用简单,最直白的正交基(不带其他分量)来完成反人类过弯
穿越机练习原则与进阶——8——摄像头角度、机身自身重量和油门的50%所确立的角度到底意味着什么——关于超跑
穿越机练习原则与进阶——9——弹簧单高跷(兔子跳同手同脚)、用屁股坐进洞里、间歇性刷锅
穿越机练习原则与进阶——10——翻滚、综合能力、学会用屁股坐实、真正的刷锅
穿越机练习原则与进阶——13——定点旋转翻滚偏离多少修正多少
分类
热门文章

Tags
关于
提供Arduino芯片编程、Java网站设计、抢票系统、秒杀系统的支持以及创客服务
全部评论