穿越机练习原则与进阶——12——精调PID
4975 2023-06-28 22:14 2025-03-19 12:00
pid直达
相关链接:自组5寸调参过程、视频深入讲解穿影x5v2PID调参过程
原标题《AstroRC大薯片CF25,穿越机pid调参过程,PIDtollbox》,转发需附带网址:https://www.21mission.cn/article/1091
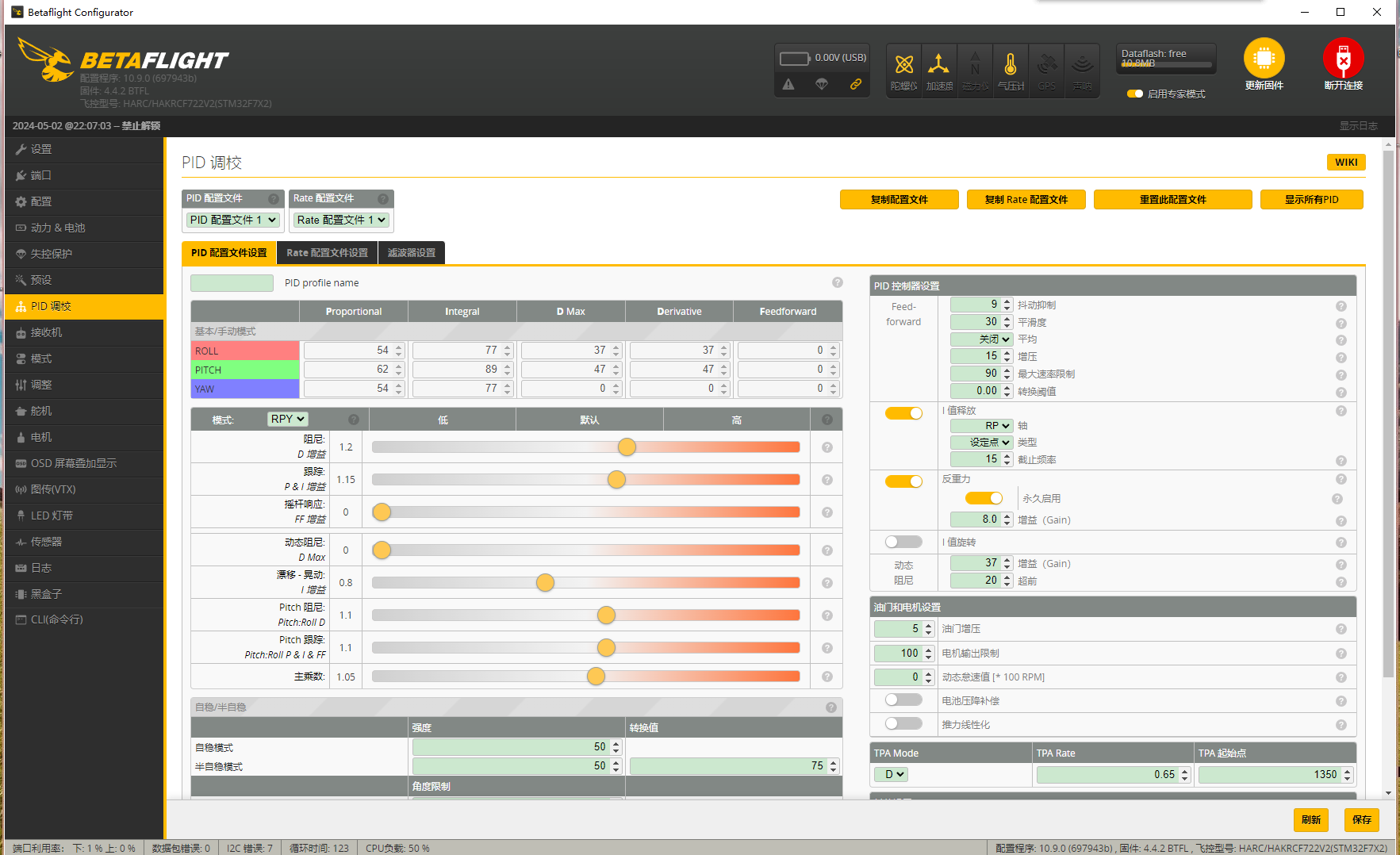
首先,(betaflight4.3之后40%足够用了)
set pidsum_limit = 1000
set pidsum_limit_yaw = 1000主乘数缓缓升高,注意看,关闭了D Min我觉得它浪费算力。
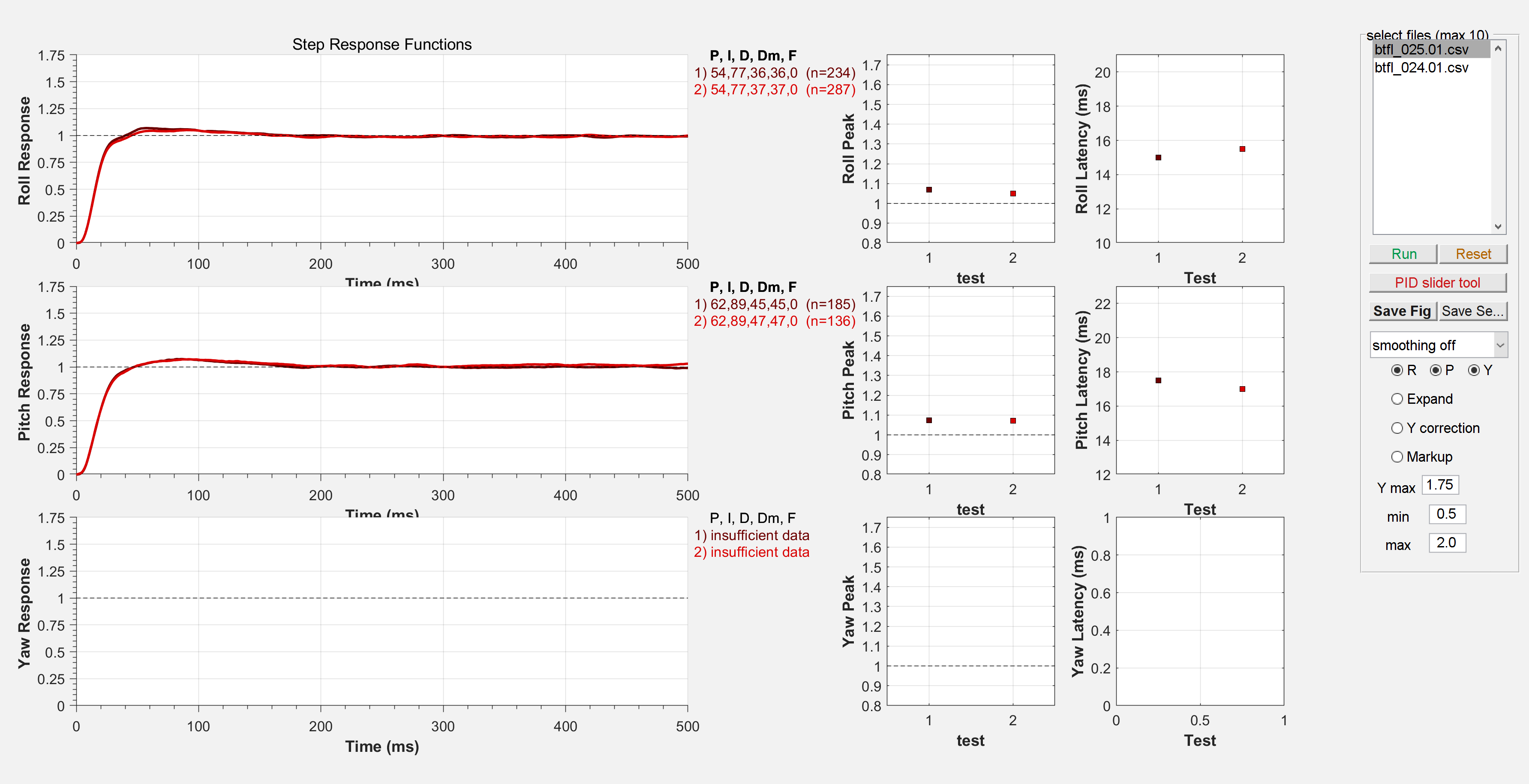
峰值(Peak)、峰值时间(PeakTime)、过冲百分比(%Overshoot)、上升时间(RiseTime)和稳定时间(SettlingMin/SettlingMax)。N指的是所分析的平均轨迹的数据段的数量。延迟(Latency )
大部分棺材板式的飞机造成俯仰的pid要大于横滚。
注意观察斜率,如果你发现自己的pitch上升速度没有roll快,那么说明你在纵向上的转动惯量较大,比如摄像头、比如天线、比如电池竖向放置。这时候需要给pitch更大的pid。
I值是如何影响穿越机漂移的(豆包回答如下:)
在 Betaflight 中,I 值可以影响穿越机的漂移。当 I 值较高时,抗风性和稳定性较好,但反应速度较慢;当 I 值较低时,反应速度较快,但抗风性和稳定性较差。在实际应用中,需要根据具体情况进行调整。

3.5寸宽X机架精调过程:粗犷版
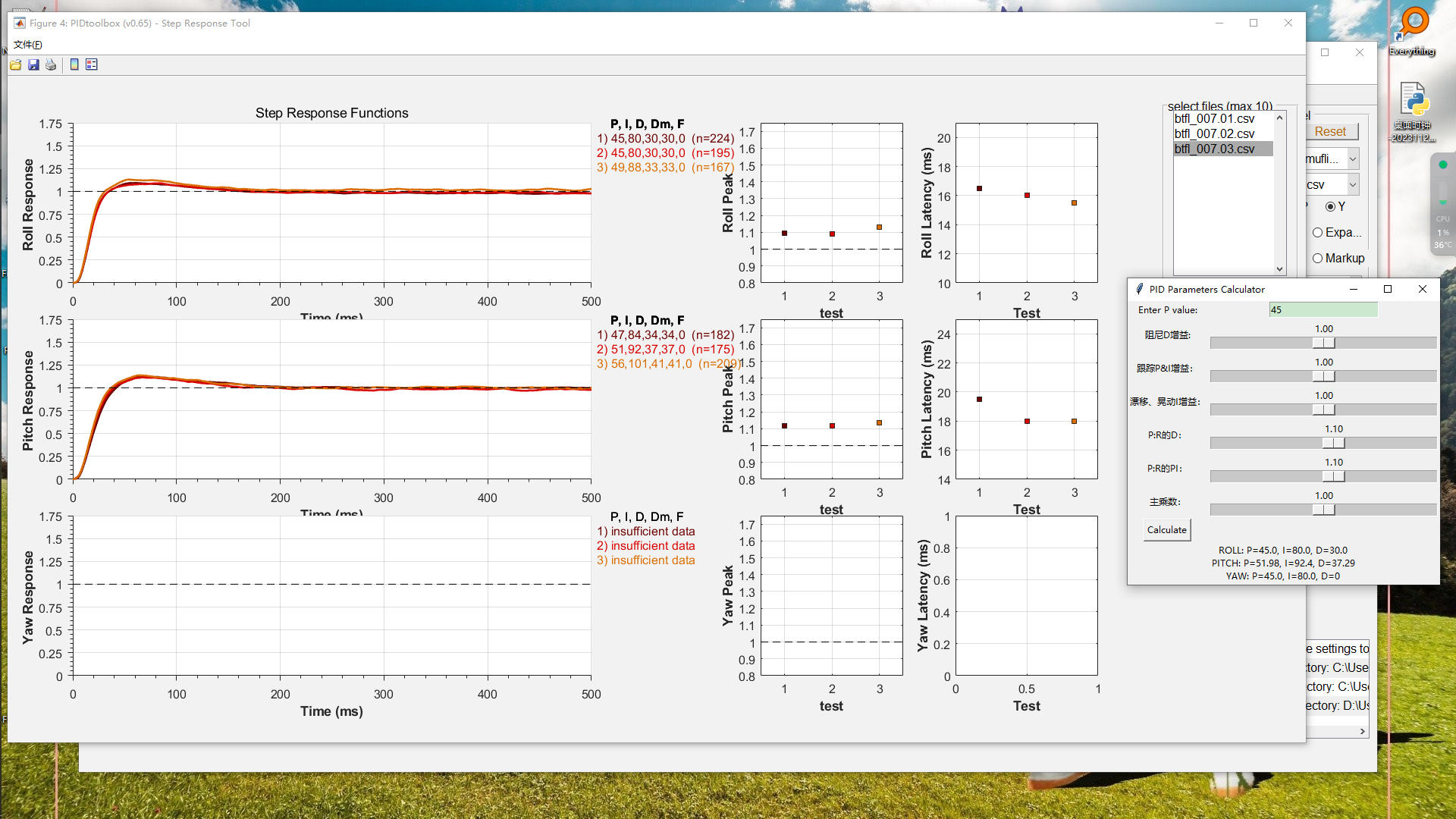
- 观察机架宽X到底有多宽,机架机身的长度和集中度,假象设定P:R的比值(PI和D同时倍率调整)。无脑调到1.1,可以做实验,过程1.1不如1.2,因为1.2之后pitch轴响应变快了。但是同时roll轴整体参数被抑制了,因为D的最大值被pitch限制了,所以D的roll轴值会变小,于是PI也不能被D压住,所以也不能调大了。(宽X的roll轴柔和,受的力小,调整行程又足够)所以才能温柔,
- 观察有没有过冲的余量。发现有,那么就可以大胆增加D了。
- 外出去做顺时针横滚和逆时针横滚。观察之后发现前馈可以增加到1.2
- 最后使用 set f_pitch = 151 来纠正ff因为多个滑块的乘积导致的过调。
搞定。
对于上述2,如果没有过冲量,那么就增加PI,如果过冲连D都压不住,那么不能让D超过50.就同时降低PI,然后等比降低D。
对非会员隐藏
5寸宽X机架粗暴调节:
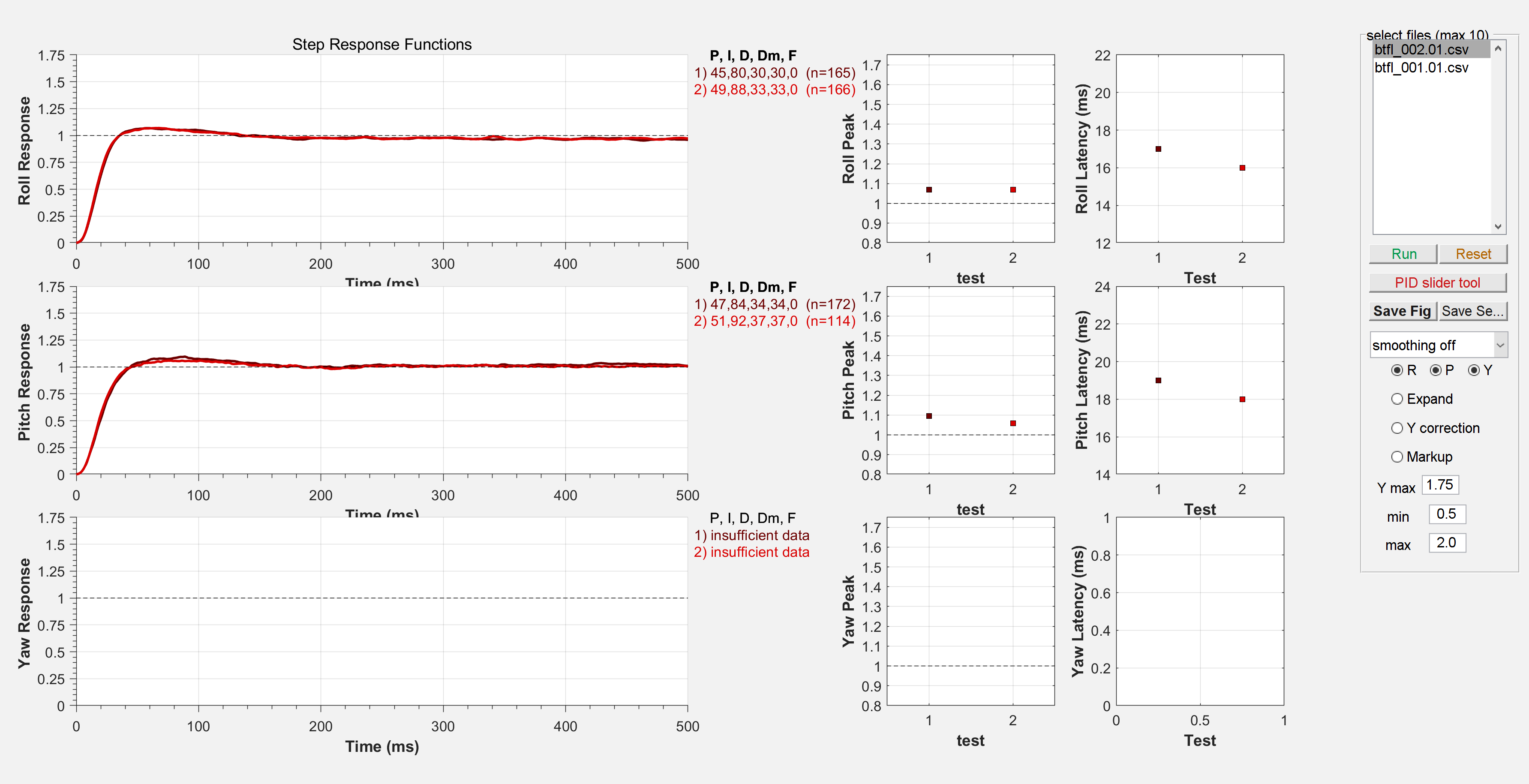
由上图可知简单调整曲线1为默认参数,曲线2为主乘数1.1的pid调校参数,产生的效果仅仅是让pitch轴相应变快,可知pitch比roll比例可调。于是将pr比例调成1.1,主乘数回归,因为曲线已经很满意,然后考虑增加前馈,将所有系数归零成1.0,只调前馈,然后记住pitch的ff,
然后用命令行在pr比例为1.1的最终结果上set f_pitch = 137,改变ff。即完成调参。否则pitch上的ff将是151.过大
为什么要设计成宽x,因为要用电机的转动惯量,去平衡纵向放置的电池;摄像头、飞塔(飞控、电调)、接收机、图传、图传天线(以及接收机天线)、BB响、GPS。
说人话就是,同样的力道,转个金箍棒,谁都知道旋钮(转竹蜻蜓)要比抡起来要省力。
前馈值按照默认纵宽比就好,没必要再跟着P:R而再次扩大。但是需要跟着主乘数的比例。
总结:如果飞机动力不足(电机、桨叶拉跨,或者电调电流有限制),那么就应该增加主乘数,如果还不行,就增加前馈
放弃前馈的原因,我不喜欢我拨杆的快慢带给我意外的惊喜惊吓,我想要稳定,虽然不是线性rate,但是我不习惯自己去适应快慢带来的前馈送你一程。所以决定去掉前馈。随之而来的问题就是,本来很好的主乘数与P:R的比例以及PD比例,都需要进行如下调整。首先我很满意默认全1的状态,除了增加P:R。如果没有了前馈,那么动态阻尼的辅助去除前馈开始阶段的超调也就没有意义了。但是我需要更大的D。那么现在有两条路。要么是增加主乘数,然后降低漂移的I保持PD比例。要么就是在主乘数默认为1(本身就是五寸很好的状态,推重比也够),基础上同时增加PD,这时候我意识到,如果主乘数变了,那么PD的单独比例就会被放大。所以我还是选择默认的基础上去调PD,哪怕看上去PD有些离谱。同时注意,增加PI去附和D就要减少I回到正常水平。
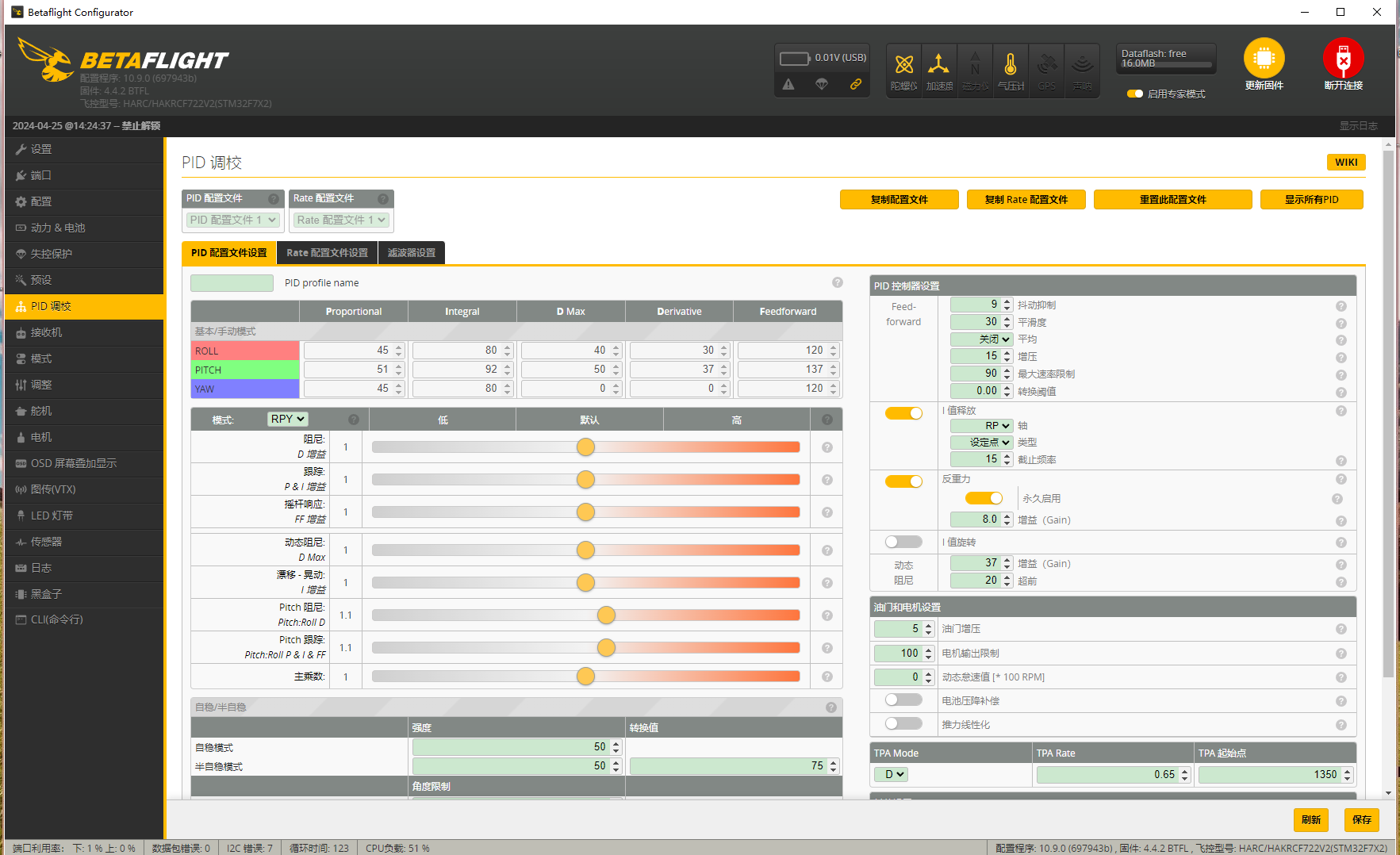
上面调参过程的说明,首先我要调整的是中①P:R的比例,所以D和PI是等比增加到1.1,然后因为测试显示默认的②PD比例很OK,所以要增加D那么就用主乘数和PI的加成来达到最终的PI:1.05*1.15=1.2075,让D比P大一些,让I回归到默认PID的状态,所以缩减为0.8.最后试飞发现小山丘比较好的保存了第一个,所以调参结束。


补充,为了利用前馈,将主乘数提高到1.1,将跟踪P&I降低到1.1,可以获得同样的效果。漂移和③动态阻尼类似,因为主乘数和跟踪都提高了,就过高了,保持PD的比例关系就好,没必要再增加④漂移晃动I来捣乱。让动态阻尼的最大差值再10,一个数量级(看pitch轴)。注意要将动态阻尼的超前关掉。
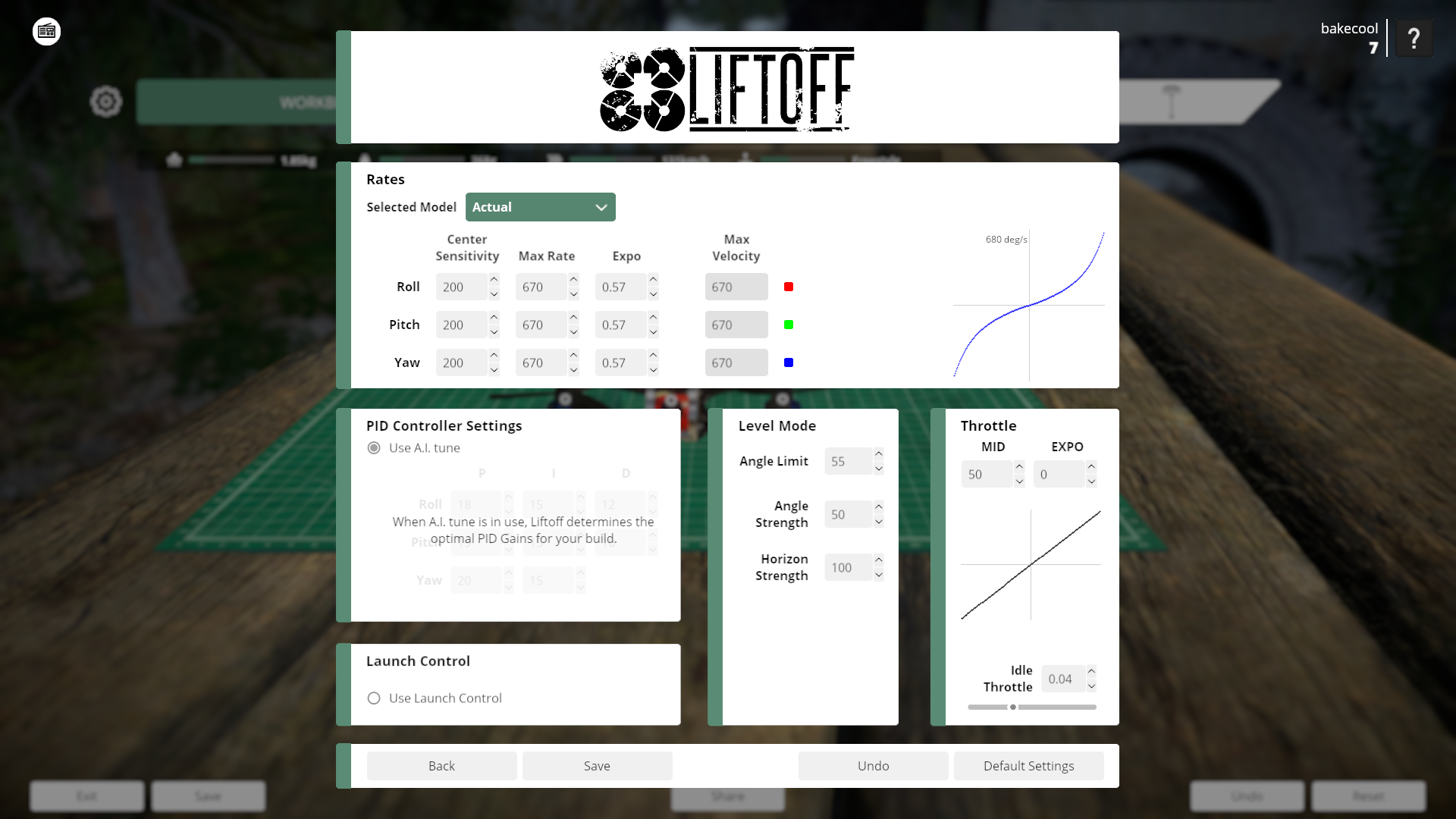
rate值的调参原则:
单指和双指:单指没有双指灵敏,所以需要曲线非线性,两端点的加速度加大,中间不灵敏。
全杆量行程和min摇杆:全行程的大控可以更加精细,所以更加线性的曲线。小尺寸的摇杆参考单指的原则。
yaw的最大角速度是pitch和roll的0.7倍,所以可以更加线性。
往期内容:
穿越机练习原则与进阶——2——左半心/右半心-左小旗帜/右小旗帜
穿越机练习原则与进阶——6——不同角度下的转弯,用简单,最直白的正交基(不带其他分量)来完成反人类过弯
穿越机练习原则与进阶——8——摄像头角度、机身自身重量和油门的50%所确立的角度到底意味着什么——关于超跑
穿越机练习原则与进阶——9——弹簧单高跷(兔子跳同手同脚)、用屁股坐进洞里、间歇性刷锅
穿越机练习原则与进阶——10——翻滚、综合能力、学会用屁股坐实、真正的刷锅
穿越机练习原则与进阶——13——定点旋转翻滚偏离多少修正多少
分类
热门文章

Tags
关于
提供Arduino芯片编程、Java网站设计、抢票系统、秒杀系统的支持以及创客服务
全部评论